Margin Angle Control of Synchronous Motors
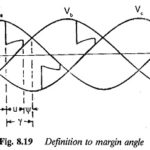
Margin Angle Control of Synchronous Motors: The commutation Margin Angle Control of Synchronous Motors is defined as the angle measured from the end of commutation to the crossing of the…
Continue Reading
Margin Angle Control of Synchronous Motors