Stability from Bode Plot of Open Loop Transfer Function
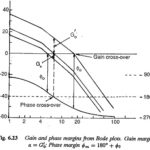
Stability from Bode Plot of Open Loop Transfer Function: The Nyquist criterion details how the open loop polar plot can be used for establishing. the stability of a closed loop…
Continue Reading
Stability from Bode Plot of Open Loop Transfer Function