Speed Detector:
One important factor in the closed loop control of variable speed drives employing solid state converters is the Speed Detector. In the dedicated hardware control using analog components, the speed sensing is accomplished by means of tachogenerator. For control of the drive using a microprocessor, this analog speed signal can be converted to digital signal by an A/D converter. This method evidently does not possess the accuracy expected of a digital system. The speed measurement must be qualified by high resolution, high accuracy, fast response over a wide range of speeds and quick sampling. Such a measuring system can be obtained only by using digital techniques. Therefore, in systems employing microprocessors the speed measurement is carried out by means of a shaft encoder or pulse generator, which generates a train of pulses depending upon the Speed Detector.
The shaft encoder is a circular light aluminium disc mounted on the shaft with equidistant holes drilled along the periphery. On the opposite sides of the disc are placed a light source and photosensitive electronic device, e.g. a phototransistor. These are aligned such that the phototransistor gets light when there is a hole across. Light activated phototransistor generates a pulse. Thus a pulse train is produced. These pulses are not very sharp and must be shaped using suitable circuitry. These pulses are processed in a microprocessor to get the actual speed of the motor.
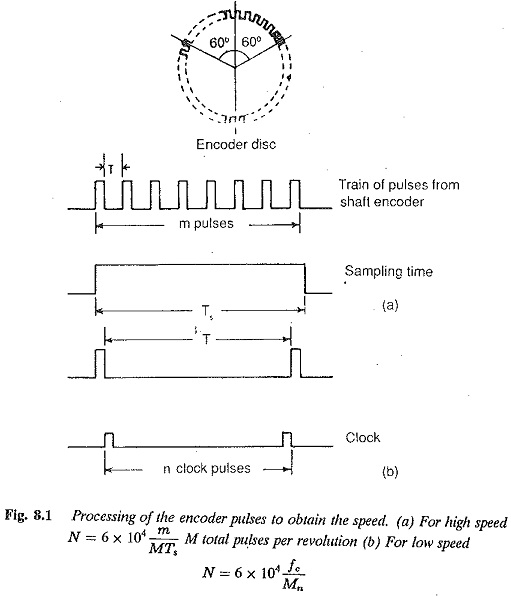
There are two methods of determining the speed (Fig 8.1).
- The pulses are counted in a given period of time. This is suitable for high speeds.
- The interval is measured between two consecutive pulses. Suitable for low speeds.
When the Speed Detector is determined using these methods, special care must be taken to see that the problems such as delay in detecting time at low speed are not there. Only with such precautions can low speeds be measured with reasonable accuracy. Thus speed control is possible over a widened range.
The high resolution of the Speed Detector sensing signifies the stable control over a wide range of speeds. The high accuracy of speed measurement improves the steady-state control accuracy. The detecting time in the measurement of speed influences the sensing of instantaneous speed. If the time is large the results give only average speed during the time. So, in order to sense the instantaneous speed in the transient and dynamic conditions this detection time must be as small as possible. A larger Speed Detector time increases the lag in the speed control system, making it difficult to realise stable high